
Swarm Robotic Systems
Here’s a project summary video:



Motivation
I built this project to optimize fireground search-and-rescue operations. This swarm robotic system can be used to survey dangerous environments and locate fires quickly, which can inform and improve rescue operations.
Technical Details
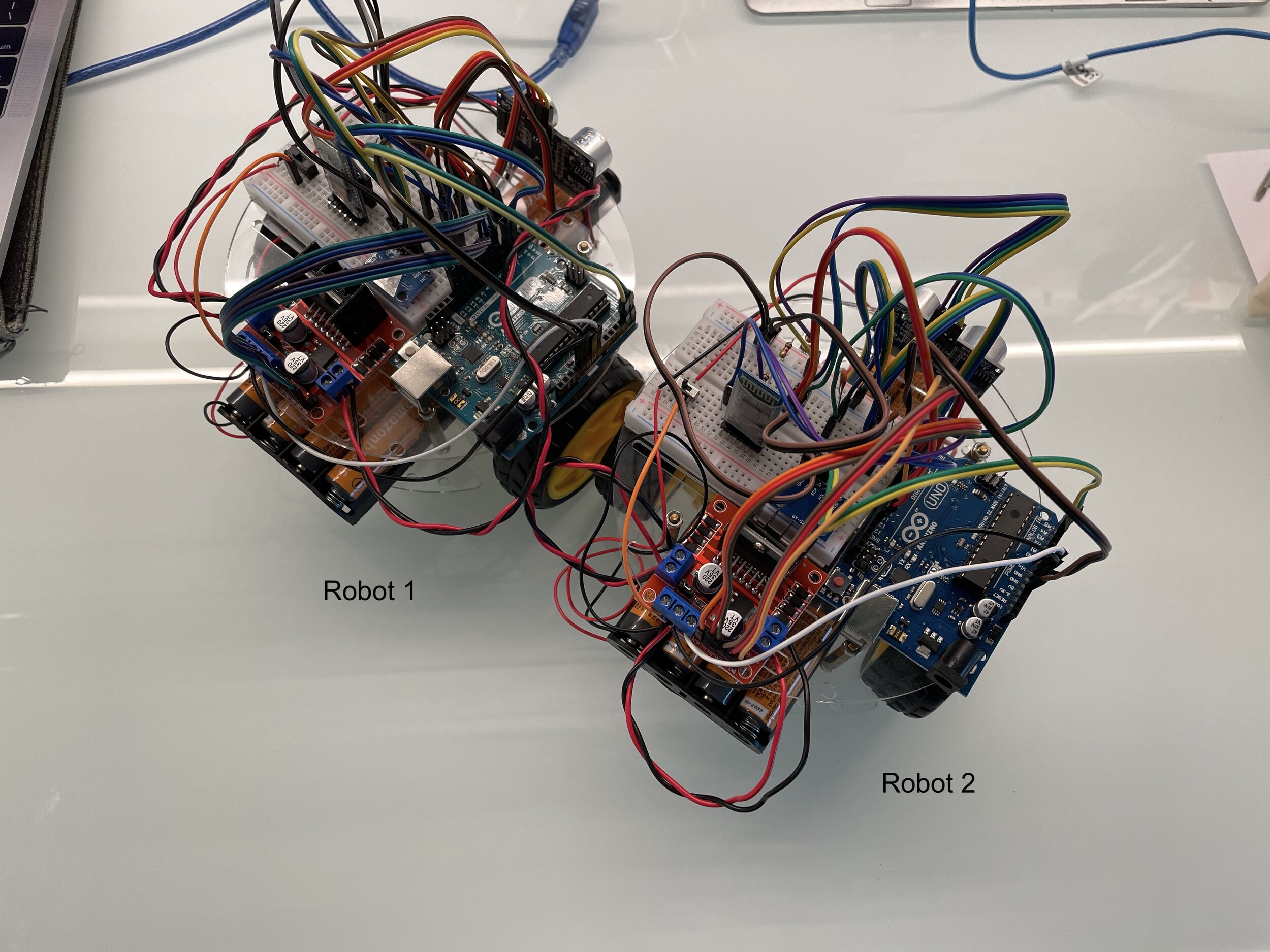
Swarm robotics systems rely on coordination between simple robots to accomplish challenging tasks, in this case, area exploration. Each robot is fitted with sensors that enable it to perform simultaneous localisation and mapping (or SLAM) and communicate via Bluetooth. The robots follow a simple state machine and work together to create a map of the environment in real-time. Robots are fitted with various sensors—IMUs, ultrasonic sensors, optical encoders—and are programmed using the Arduino (C++) language. Robots are also able to detect fires. When one robot detects a fire, it communicates this information, via Bluetooth, to other robots. All robots rendezvous at the fire. The swarm system is able to locate obstacles, fires and map out the environment at a rate of approximately 0.03 sq. metres per robot per second.